

(AC/Sp/SpA)IN-Cal
Informed Nonnegative Matrix Factorization Methods for Mobile Sensor Network Calibration
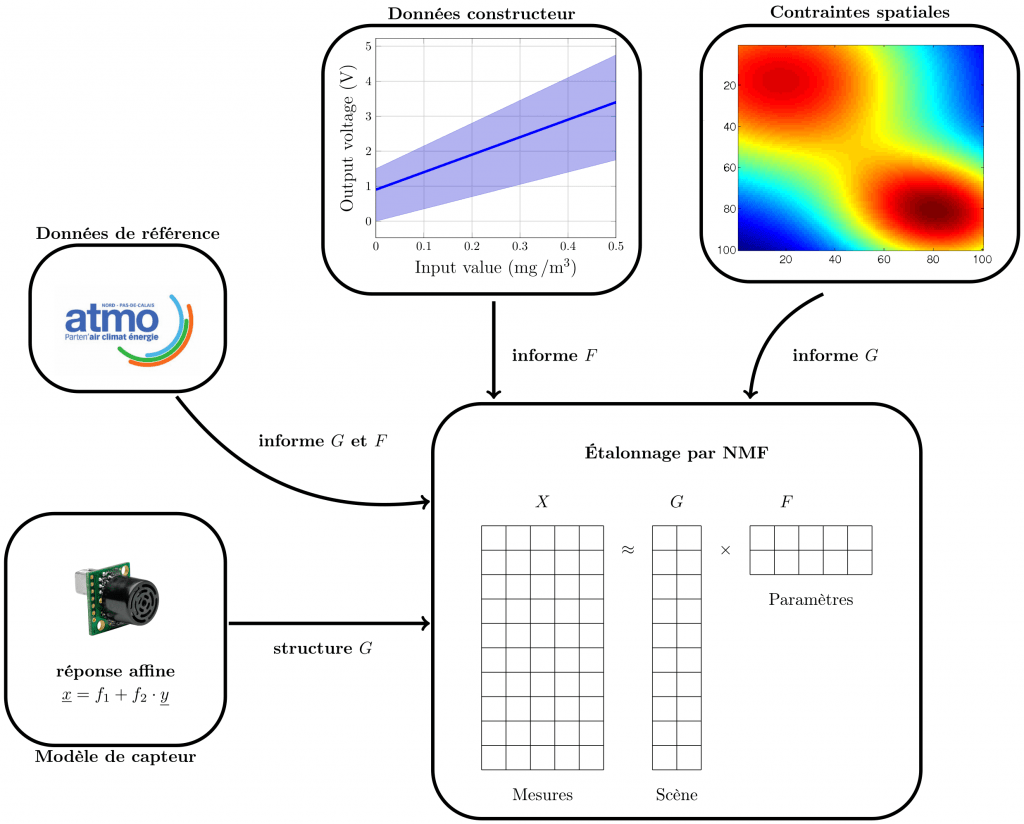
IN-Cal, ACIN-Cal, SpIN-Cal et SpAIN-Cal sont des méthodes d’étalonnage in situ de capteurs mobiles soumis à des dérives. Ces approches sont basées sur des formalismes informés de factorisation en matrices non-négatives.
Ces approches combinent des hypothèses de méthodes de macro-étalonnage (qui cherchent à réaliser l’étalonnage de tout le réseau de capteurs) avec celles de micro-étalonnage (qui cherchent à n’étalonner qu’un capteur à la fois) et permettent une hypothèse relâchée sur la densité du réseau et le nombre de rendez-vous entre capteurs par rapport aux méthodes de la littérature.
Ces méthodes diffèrent ainsi :
- IN-Cal est la méthode « de base » qui tient compte d’une mesure de confiance associée à chaque mesure de chaque capteur et qui peut utiliser les données de références pour améliorer l’étalonnage.
- ACIN-Cal est une extension d’IN-Cal qui permet de contraindre les paramètres d’étalonnage à être distribués autour d’une moyenne supposée connue et fournie par le fabricant de capteurs.
- SpIN-Cal est une extension d’IN-Cal qui rajoute une contrainte de parcimonie sur le facteur matriciel de la factorisation associé au phénomène physique mesuré. Plus particulièrement, SpIN-Cal suppose l’existence de patterns spatiaux préalablement appris qui permettent de réaliser conjointement l’étalonnage du réseau de capteurs et la cartographie du phénomène observé.
- SpAIN-Cal enfin est une extension d’IN-Cal qui combine les idées d’ACIN-Cal et de SpIN-Cal.
Le code Matlab de ces méthodes peut être téléchargé sur : https://gogs.univ-littoral.fr/puigt/Informed_NMF_Mobile_Sensor_Calibration/